Im Bereich der industriellen Automatisierung steht die Mehrachsen-Leistungsausführungsrobotik als Eckpfeiler moderner Fertigungs- und Inspektionsprozesse. Unter den kritischen Komponenten, die die Präzision und Zuverlässigkeit dieser Robotersysteme ermöglichen, haben sich Dehnungswellenräder als führende Lösung entwickelt. Ihre einzigartige Kombination aus hoher Drehmomentdichte, kompakter Konstruktion und außergewöhnlicher Genauigkeit macht sie unverzichtbar in Anwendungen, die eine präzise Bewegungssteuerung erfordern, wie z. B. Routing-Inspektionsroboter.
Dieses Anwendungsbeispiel unterstreicht die Integration von Dehnungswellenrädern in die Handgelenkachse eines 2-achsigen Roboters, der für Routing-Inspektionsaufgaben entwickelt wurde. Die anspruchsvolle Natur dieser Anwendung erfordert Dehnungswellenräder, die rückschlagfrei sind, hohe Belastungen umgehen und hohe Torsionssteifigkeit aufweisen. Darüber hinaus sind geringes Betriebsgeräusch und eine verlängerte Lebensdauer entscheidend, um eine ununterbrochene Leistung in industriellen Umgebungen sicherzustellen. Diese Anforderungen werden durch unsere fortschrittliche Dehnungswellengetriebetechnologie erfüllt, die für solche leistungsstarken Anwendungen streng getestet und optimiert wurde.
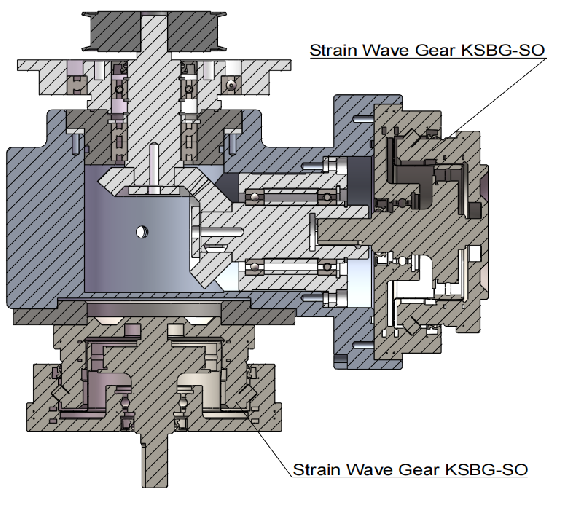
Die technische Konstruktion dieser Robotereinheit wird von unseren ksbg-so simplicity Box Units unterstützt, einer spezialisierten Serie von Dehnungswellenzahnrädern, die auf die Industrierobotik zugeschnitten sind. Ein herausragendes Merkmal der ksbg-so Serie ist die Integration eines kraftvollen Kreuzwalzenlagers, das die Fähigkeit des Gerätes, Kippmomente zu widerstehen, deutlich verbessert. Dies ist besonders wichtig bei Robotergelenken, wo das Ausgangslager des Dehnungswellenrads oft erheblichen mechanischen Belastungen ausgesetzt ist. Durch die Einbindung dieses robusten Lagerdesigns sorgen die ksbg-so Geräte für einen zuverlässigen Betrieb auch unter schwierigsten Bedingungen und sind damit ideal für industrielle Roboteranwendungen.
In dieser spezifischen Konstruktion wird die Leistungsausführungsrobotereinheit durch die Integration eines hochpräzisen Spiralkegelrads weiter verbessert. Die optimierte Zahnverbindung des Spiralkegelrads trägt zu einer überlegenen Geräuschkontrolle bei und sorgt dafür, dass das Robotersystem ruhig und effizient funktioniert. Diese Kombination aus Dehnungswellen- und Spiralkegelrädern schafft einen synergistischen Effekt und sorgt sowohl für Präzision als auch Haltbarkeit in einem kompakten Formfaktor.
Ein weiterer wichtiger Vorteil dieses Designs ist seine Modularität. Die Dehnungswellengetriebe können einfach zur Wartung oder zum Austausch zerlegt werden, ohne dass die Roboter-Leistungseinheit vollständig zerlegt werden muss. Dieser modulare Ansatz reduziert nicht nur die Ausfallzeiten, sondern vereinfacht auch den Wartungsprozess, wodurch das System benutzerfreundlicher und kostengünstiger über seinen Lebenszyklus verfügt.
Die Anwendung von Dehnungswellenrädern in dieser Mehrachsen-Leistungsausführungsrobotereinheit unterstreicht ihre Vielseitigkeit und Zuverlässigkeit in anspruchsvollen industriellen Umgebungen. Durch die Nutzung der einzigartigen Vorteile der Dehnungswellengetriebetechnologie, wie hohe Belastbarkeit, geringe Rückschläge und kompaktes Design, erzielt dieses Robotersystem eine beispiellose Leistung bei der Routing-Inspektion. Darüber hinaus sorgt die Integration fortschrittlicher Lagersysteme und modularer Konstruktionsprinzipien dafür, dass das System robust, wartungsfähig und zukunftsfähig bleibt.
Zusammenfassend lässt sich sagen, dass der Einsatz von Dehnungswellenrädern in dieser Anwendung ihre entscheidende Rolle bei der Weiterentwicklung der Robotertechnologie beispielhaft macht. Da sich die industrielle Automatisierung weiter entwickelt, wird die Nachfrage nach Hochleistungs-Dehnungswellenrädern nur zunehmen und ihre Position als Schlüsselfaktor für Präzision und Effizienz in der modernen Robotik festigen.