En el campo de la automatización industrial, la unidad de robótica de ejecución de potencia multieje es la piedra angular de los procesos modernos de fabricación e inspección. Entre los componentes críticos que permiten la precisión y confiabilidad de estos sistemas robóticos, los engranajes de onda de deformación han surgido como una solución líder. Su combinación única de alta densidad de par, diseño compacto y excepcional precisión los hace indispensables en aplicaciones que requieren control preciso de movimiento, como robots de inspección de ruta.
Este ejemplo de aplicación destaca la integración de engranajes de onda de deformación en el eje de la muñeca de un robot de dos ejes diseñado para tareas de inspección de ruta. La naturaleza exigente de esta aplicación requiere engranajes de onda de deformación que no son reacciones, pueden manejar cargas altas y muestran una alta rigidez torsional. Además, el bajo ruido operativo y la vida útil prolongada son esenciales para garantizar un rendimiento ininterrumpido en entornos industriales. Estos requisitos se cumplen con nuestra avanzada tecnología de engranajes de onda de deformación, que ha sido rigurosamente probada y optimizada para tales aplicaciones de alto rendimiento.
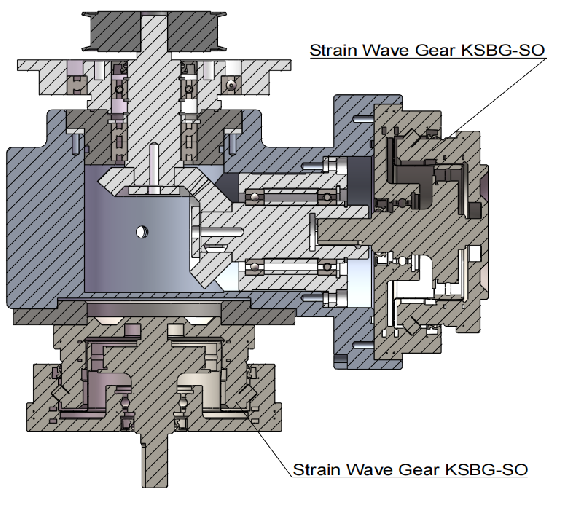
El diseño de ingeniería de esta unidad robótica está respaldado por nuestra unidad de caja KSBG-So Simple, una serie especializada de engranajes de onda de tensión adaptados a la robótica industrial. Una característica destacada de la serie ksbg-so es su integración de un poderoso rodamiento de rodillos cruzados, que mejora significativamente la capacidad de la unidad para resistir los momentos de inclinación. Esto es particularmente crucial en las articulaciones robóticas, donde los rodamientos del lado de salida de los engranajes de onda de deformación a menudo están sujetos a una tensión mecánica sustancial. Al incorporar este robusto diseño de rodamientos, las unidades ksbg-so garantizan un funcionamiento confiable incluso en las condiciones más difíciles, lo que las convierte en la opción ideal para aplicaciones de robots industriales.
En este diseño específico, la unidad de robot de ejecución de potencia se mejora aún más mediante la integración de engranajes cónicos en espiral de alta precisión. El engranaje cónico espiral optimizado contribuye a un control de ruido superior, garantizando que el sistema robótico funcione en silencio y eficiencia. Esta combinación de engranajes de onda de deformación y engranajes cónicos espirales crea un efecto sinérgico, proporcionando precisión y durabilidad en un factor de forma compacto.
Otra ventaja clave de este diseño es su modularidad. La unidad de engranaje de onda de deformación se puede desmontar fácilmente para mantenimiento o reemplazo sin necesitar un desmontaje completo de la unidad de potencia del robot. Este enfoque modular no solo reduce el tiempo de inactividad sino que también simplifica el proceso de mantenimiento, haciendo que el sistema sea más fácil de usar y rentable a lo largo de su ciclo de vida.
La aplicación de engranajes de onda de deformación en esta unidad de robótica de ejecución de potencia multieje subraya su versatilidad y confiabilidad en ambientes industriales exigentes. Este sistema robótico aprovecha los beneficios únicos de la tecnología de engranajes de onda de deformación, como alta capacidad de carga, baja reacción y diseño compacto, y logra un rendimiento incomparable en las tareas de inspección de ruta. Además, la integración de sistemas avanzados de rodamientos y principios de diseño modular garantiza que el sistema siga siendo robusto, mantenible y a prueba del futuro.
En resumen, el uso de engranajes de onda de deformación en esta aplicación muestra su papel crítico en el avance de la tecnología robótica. A medida que la automatización industrial continúa evolucionando, la demanda de engranajes de onda de deformación de alto rendimiento solo crecerá, fortaleciendo su posición como un factor clave para la precisión y eficiencia en la robótica moderna.