스트레인파 기어의 역사
스트레인 웨이브 기어는 1957년 월튼 머서가 발명했습니다. 처음에는 아폴로 달 탐사차의 전기 구동 휠에 적용되었습니다. 60년의 개발을 거쳐 현재는 고급 산업의 다양한 응용 분야에 적용되고 있습니다.
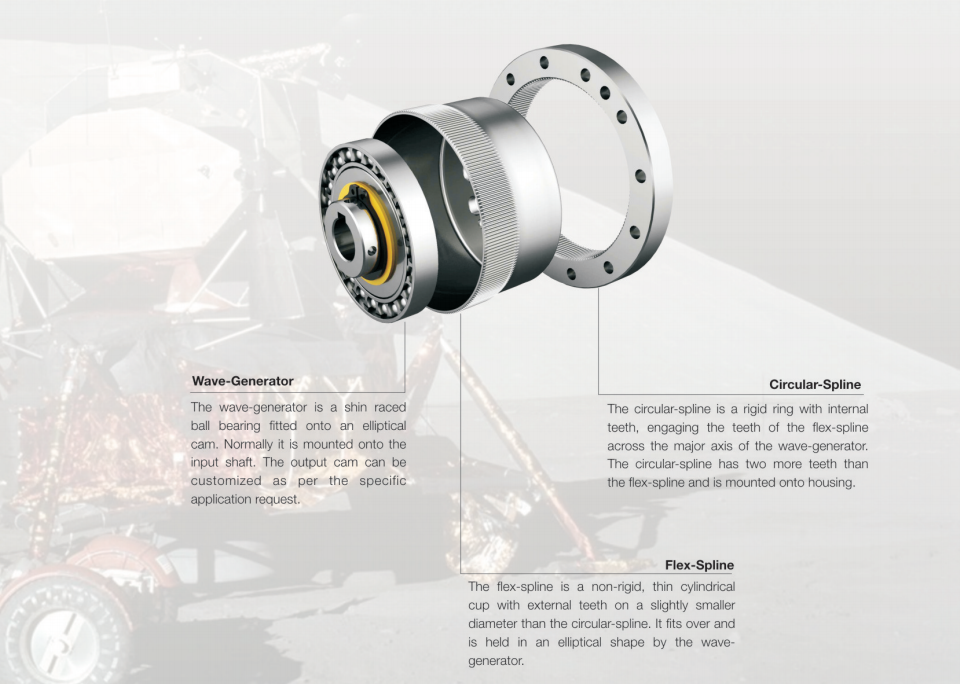
스트레인파 기어의 작동 원리
플렉스 스플라인은 원형 스플라인보다 직경이 약간 작아서 바깥쪽 둘레에 이가 두 개 적습니다. 파동 생성기에 의해 타원형 모양으로 유지되고 이가 타원의 장축을 가로질러 원형 스플라인의 이와 맞물립니다.
파동 생성기가 시계 방향으로 회전하기 시작하면 이빨 맞물림 구역이 주요 타원 축과 함께 이동합니다. 파동 생성기가 시계 방향으로 180도 회전하면 플렉스 스플라인은 원형 스플라인에 비해 이빨 하나가 후퇴합니다.
금속의 탄성 역학을 적용하는 고유한 작동 원리로, 스트레인 웨이브 기어 이빨 거동은 자유로운 백래시 모션과 높은 위치 반복성을 달성할 수 있습니다. 모든 이빨의 30%개 이상이 180도 대칭으로 두 위치에서 맞물려 높은 효율과 높은 토크 성능을 달성합니다.